





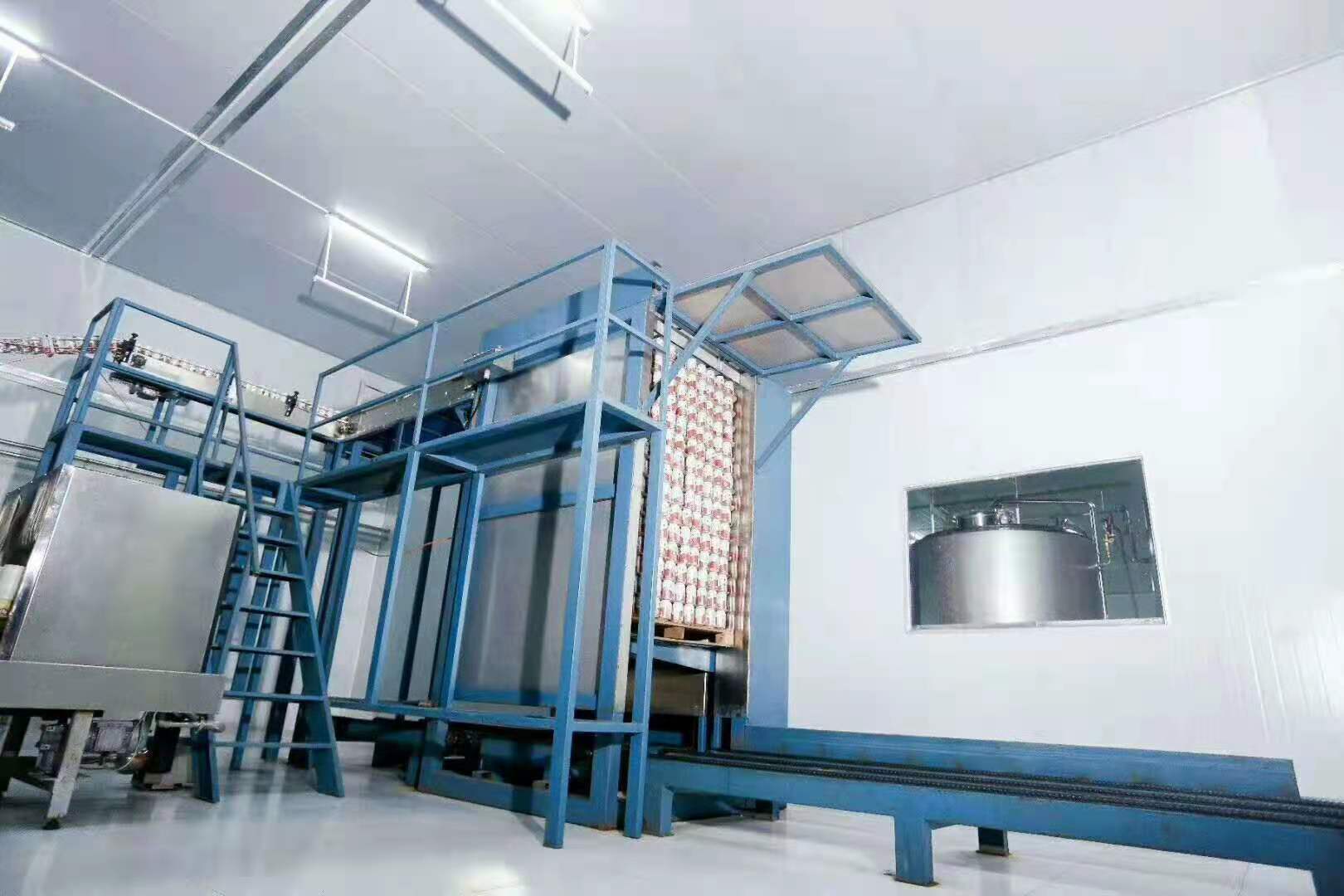
အလိုအလျောက် 36000cph အဆင့်မြင့်မားသောအဖျော်ယမကာလိုင်းအတွက် depalletizer နိုင်ပါတယ်။

အတိုချုံးဖော်ပြချက်-
ရှန်ဟိုင်းIpနှင့် Intelligent စက်ယန္တရားCo. ltd သည် ထုပ်ပိုးမှုဆိုင်ရာ ပစ္စည်းအမျိုးမျိုး၏ ပရော်ဖက်ရှင်နယ် ထုတ်လုပ်သူဖြစ်သည်။We အပြည့်အဝထုတ်လုပ်မှုလိုင်းကိုကမ်းလှမ်းအပါအဝင်ပုလင်းအစာကျွေးစက်၊ အဆာပြေစက်၊ ထုပ်ပိုးစက်၊ တံဆိပ်ကပ်စက်၊ ထုပ်ပိုးစက်နှင့် အရန်ပစ္စည်းများ ကျွန်ုပ်တို့၏ဖောက်သည်များအတွက်.

We အပေါ်အာရုံစိုက်သည်ထုတ်လုပ်သည်။ အမျိုးမျိုးဖြည့်စွက်အမျိုးအစားများထုတ်လုပ်မှုလိုင်းဆေးတောင့်၊ အရည်၊ ငါးပိ၊ အမှုန့်၊ aerosol၊ corrosive liquid စသည်တို့ကဲ့သို့ မတူညီသော ထုတ်ကုန်များအတွက်၊ဘယ်ဟာတွေလဲ။တွင်ကျယ်စွာအသုံးပြုသည်။မတူဘူး။စက်မှုလုပ်ငန်းများ အပါအဝင်၊အစားအသောက်/အဖျော်ယမကာ/အလှကုန်/ရေနံဓာတုပစ္စည်းစသည်တို့ကျွန်ုပ်တို့၏ မီတာ၊ကိုက်ခဲတာတွေ၊အားလုံး cဖောက်သည်အလိုက် စိတ်ကြိုက်ပြင်ဆင်ထားသည်။'s ထုတ်ကုန်နှင့်တောင်းဆိုမှု။ဤထုပ်ပိုးသည့်စက်စီးရီးသည် ဆန်းသစ်သောဖွဲ့စည်းပုံဖြစ်ပြီး လည်ပတ်ရာတွင် တည်ငြိမ်ပြီး လည်ပတ်ရလွယ်ကူပါသည်။ မှာယူမှုများညှိနှိုင်းရန် ဖောက်သည်အသစ်များနှင့် အဟောင်းများကို ကြိုဆိုသောစာ၊ ဖော်ရွေသောမိတ်ဖက်များ တည်ထောင်ခြင်းအား ကြိုဆိုပါသည်။ကြှနျုပျတို့မှာ ... ရှိသညျဖောက်သည်များ အရှေ့အလယ်ပိုင်း၊ အရှေ့တောင်အာရှ၊ ရုရှား စသည်တို့ကို ပေါင်းစည်းသည်။ရှိသည်အမြတ်ed ကောင်းသောမှတ်ချက်များအရည်အသွေးမြင့်ပြီး ဝန်ဆောင်မှုကောင်းကောင်းနဲ့ ပေးတယ်။.
Ipanda Intelligent Machinery Garhers ၏ ထုတ်ကုန်ကျွမ်းကျင်ပညာရှင်များ၊ အရောင်းကျွမ်းကျင်သူများနှင့် အရောင်းအပြီးဝန်ဆောင်မှုဝန်ထမ်းများ၏ အရည်အချင်းပြည့်မီသောအဖွဲ့သည် စီးပွားရေးဆိုင်ရာ အတွေးအခေါ်ကို ပံ့ပိုးပေးပါသည်။“မြင့်မားသောစွမ်းဆောင်ရည်, ကောင်းသောဝန်ဆောင်မှု, ကောင်းသောဂုဏ်သိက္ခာ”အီးအင်ဂျင်နီယာများသည် တာဝန်ရှိပြီး ပရော်ဖက်ရှင်နယ်ဖြစ်သည်။ငါနှင့်အတူ 1 ကျော်5 နှစ်အတွေ့အကြုံ စက်မှုလုပ်ငန်း၌.ကျွန်ုပ်တို့သည် သင့်ထုတ်ကုန်နမူနာများနှင့် ဖြည့်စွက်ပစ္စည်းများအတိုင်း ထုပ်ပိုးခြင်း၏ အစစ်အမှန်အကျိုးသက်ရောက်မှုကို ပြန်ပေးမည်ဖြစ်ပြီး စက်ကောင်းစွာအလုပ်မလုပ်မချင်း၊ ကျွန်ုပ်တို့သည် ၎င်းကို သင့်ဘက်သို့ ပို့ဆောင်မည်မဟုတ်ပါ။.ပူဇော်ရန် ရည်ရွယ်ပါသည်။ အဆင့်မြင့်ထုတ်ကုန်များ ကျွန်ုပ်တို့၏ဖောက်သည်များအတွက်ကျွန်ုပ်တို့သည် SS304 ပစ္စည်း၊ ယုံကြည်စိတ်ချရသောအစိတ်အပိုင်းများကို လက်ခံပါသည်။ ထုတ်ကုန်များအတွက်။ တစ်ဦးနှင့်တစ်ဦးll အဆိုပါစက်တွေရောက်ပြီ။ CE စံနှုန်း။Overseas after-sales service ဖြစ်ပါ သည်။ကိုလည်းရရှိနိုင်ပါသည်၊ ကျွန်ုပ်တို့၏ အင်ဂျင်နီယာသည် ဝန်ဆောင်မှုပံ့ပိုးမှုအတွက် နိုင်ငံများစွာသို့ သွားပြီဖြစ်သည်။ကျွန်တော်တို့ အမြဲတမ်း ကြိုးစားနေပါတယ်။ အရည်အသွေးမြင့် စက်များနှင့် ဝန်ဆောင်မှုများကို ပေးဆောင်ရန်to ဖောက်သည်များ။
အဘယ်ကြောင့်U ကိုရွေးပါ။s
ဌသုတေသနနှင့် ဖွံ့ဖြိုးရေးအတွက် အပ်နှံခြင်း။
ဌအတွေ့အကြုံရှိသောစီမံခန့်ခွဲမှု
ဌCustomer တွေရဲ့ လိုအပ်ချက်ကို ပိုနားလည်လာမယ်။
ဌBroad Range Offering ဖြင့် One Stop ဖြေရှင်းချက်ပေးသူ
ဌကျွန်ုပ်တို့သည် OEM & ODM ဒီဇိုင်းကိုထောက်ပံ့ပေးနိုင်သည်။
ဌဆန်းသစ်တီထွင်မှုဖြင့် စဉ်ဆက်မပြတ် တိုးတက်မှု
မောင်းတံ မြင့်သည်။နိုင်သည်depalletizer သည် ဗလာကျင်းထားသော ထုပ်ပိုးထားသော (depalletize) ကို unload လုပ်သော စက်ဖြစ်သည်။နိုင်သည်pallet မှ s သို့မဟုတ် ဖန်ပုလင်းများ။depalletizer သည် လူ့ဝန်ထမ်းများကိုအသုံးမပြုဘဲ pallet များမှ ကုန်ပစ္စည်းများနှင့် ပစ္စည်းများကို လွှဲပြောင်းနိုင်သောကြောင့် အချိန်၊ ငွေနှင့် ကြိုးစားအားထုတ်မှုကို သက်သာစေပါသည်။




